技术特色和优势
M3 Trolly:基于SLAM的3D点云、2D全景、Wifi、蓝牙、地磁等数据采集和信息模型转换技术
Indoorviewer:在任意浏览器对全景空间数据进行VR漫游、导航、测量和规划
Navigation App:基于机器视觉的、精确到米的室内导航算法,无需基础设施投资
M3 Trolly:数据采集系统
- 基于机器人技术和机器自学习技术的多传感器系统,快速完成室内空间多种信息的采集,快速生成二维平面图
- 三维激光扫描:3组,每100m误差约20-30mm
- 全景摄像机:6组,每组1600万像素
- Wifi、蓝牙、地磁场、beacon等信号采集传感器
- 自动实现数据拼合
-

IndoorViewer:无以伦比
- 强大的VR漫游、测量、导航和规划软件
- 可通过手机、ipad、PC等任意网络浏览器终端使用
- 可在信息模型上添加多媒体内容、通过POI与数据库及传感器连接
- 超大数据处理能力
-
Navigation App:机器视觉导航
- 基于机器视觉识别技术实现自我定位和路径规划,完成室内导航
- 不需要投资建设wifi、beacon等,通过手机拍照即可完成自我定位
-

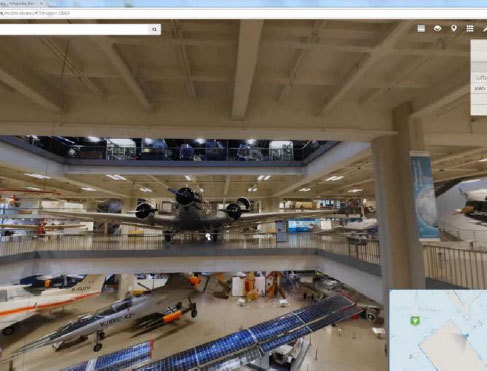
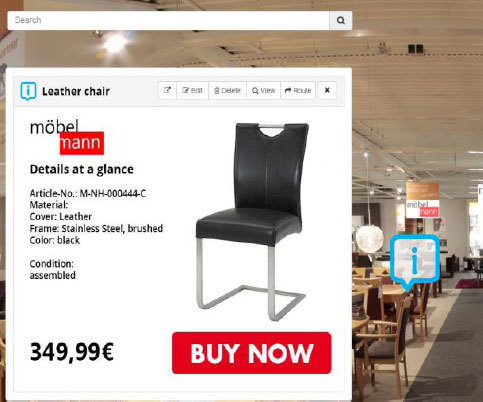
典型应用之:VR商城
- 机场航站楼、交通枢纽综合体、大型卖场、博物馆等的实景VR漫游、导航
- 可添加购物点,将浏览器变成VR电商平台
- 展厅多风格数字化,节约展厅面积
- 提供基于室内位置的信息服务
-
典型应用之:工厂管理
- 指导工作人员,记录并提高基于精确室内位置的数据,分析现场工作
- 减少检查、维修、保养、培训等工作所需的现场访问
- 工厂设施管理自动化、可视化
-

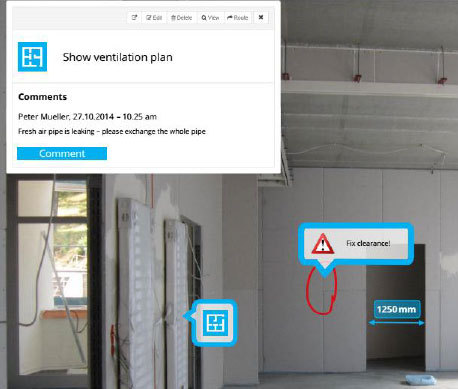
典型应用之:施工监测
- 数字化记录施工现场细节,远程进度监控、管理协作
- 通过IndoorViewer对工地进行远程访问
- 利用POI提取详细工程信息、下达指令
- 提供装修装饰所需尺寸信息
-
典型应用之:建筑CAD获取
- 扫描后获得的三维点云数据可以快速转换成CAD平面图
- 点云数据可用于BIM的构造
-

时间 2016-08-09浏览 次
 200591300
200591300